
Stepped planing hull – pros and cons (Eng)
There are a lot of legends connected with steps on hulls. Many people claim that this solution is good only for the racing industry and is very dangerous for normal recreational users. What are the real facts, however? There is ample evidence showing that the stepped hull has less drag than the classic deep V-hull. […]
Założenia koncepcyjne – nowa łódź

Przed wyborem łodzi, każdy myślący o zakupie winien wziąć pod uwagę następujące kwestie Należy odłożyć na bok kwestie estetyczne i wyposażenia dodatkowego – do nich należy wrócić po ustaleniu poniższych zagadnień, Podstawowe pytanie jakie należy sobie zadać to do jakich celów ma służyć jednostka. Rekreacyjnych czy komercyjnych, jeżeli rekreacyjnie to czy ma to być miejsce […]
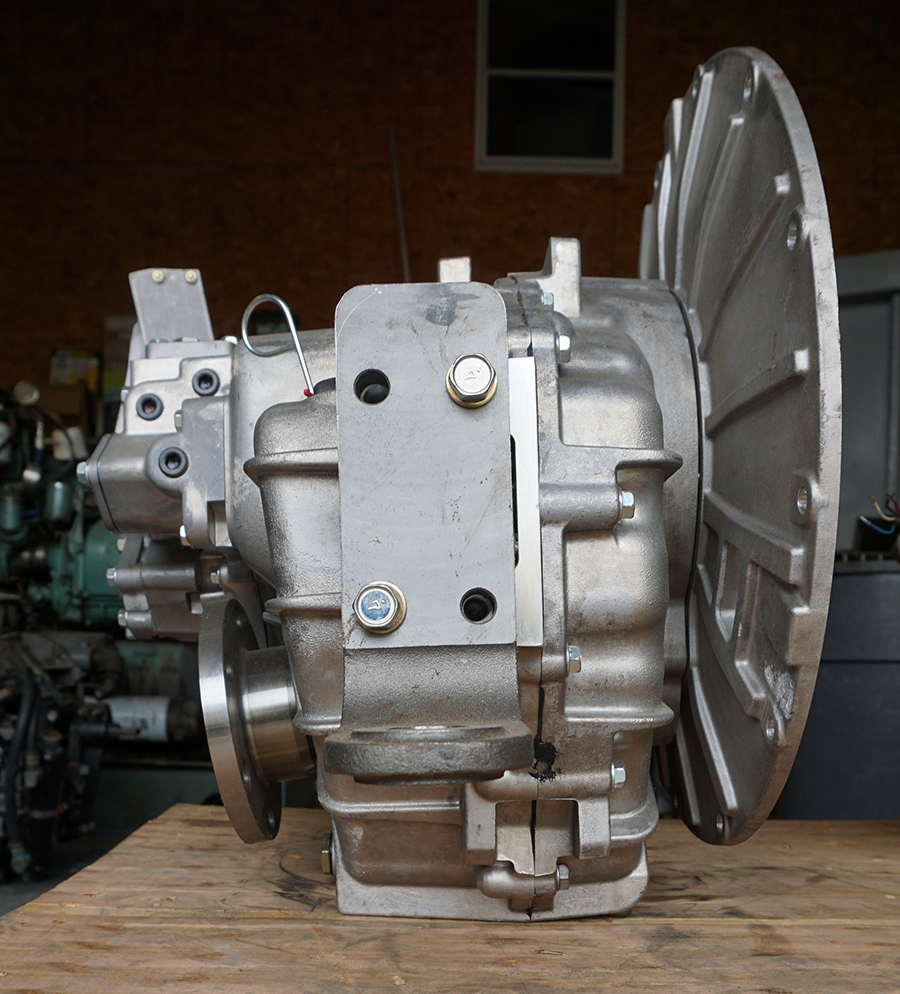
Surface Drive

Napęd typu Surface Drive jest dedykowany do szybkich łodzi motorowych jako najefektywniejszy z wszystkich rodzajów napędów jednak jak każdy ma ograniczenia w zastosowaniu. Nie nadaje się jako opcja do łodzi ratunkowych pilnujących kąpielisk ze względu na ryzyko zranienia (podobne jak inne napędy z wyjątkiem water jet). Właśnie ze względu na ryzyko zranienia po wypadnięciu z […]
Rodzaje napędów i ich krótka charakterystyka

Tradycyjny napęd śrubowy na wale – prostota wykonania i duża niezawodność, stosowany do prędkości poniżej 30 kn jak również do jednostek dużych i ciężkich. Napęd tolerancyjny na duże różnice w tonażu, sprawdzający się w trudnych warunkach. Tani w serwisowaniu. Najtańszy w inwestycji Stern drive – przekładnie typu Z do silników wbudowanych (Bravo 1, Brawo 2, Brawo […]
Porównanie producentów systemów napędów powierzchniowych

Trimability / Trymowalność – jest to główna cenach napędu powierzchniowego pozwalająca na pełne wykorzystanie jego potencjału. To ona pozwala na łatwe efektywne operowanie biegiem wstecznym, uzyskiwanie maksymalnych prędkości przy różnych warunkach morskich, pływanie na płyciznach. Dzięki trymowaniu eliminujemy lub znacznie ograniczamy podbijanie kadłuba przez fale. Napęd powierzchniowy na sztywny wale jest idealny do uzyskiwania maksymalnych prędkości […]
Informacje niezbędne do właściwego doboru napędu

Dla właściwego doboru napędu niezbędne jest podejście całościowe uwzględniające środowisko pracy, dane kadłuba, silnika, przekładni. Rodzaj kadłuba – monohull (pojedynczy), katamaran czy trimaran, każdy z kadłubów inaczej wpływa na opory hydrodynamiczne, stabilność Wyporność , masa – bardzo ważny wskaźnik determinujący moc jednostek napędowych. Konieczne jest dokładne określenie masy podstawowej oraz maksymalnej. Niedoszacowanie masy jest najczęściej spotykanym powodem […]
Szczegółowe porównanie SDS z Water Jet

Najczęściej zadawanym przez potencjalnych klientów pytaniem jest dlaczego mamy użyć SDS zamiast Water Jet. Na tak zadane pytanie zawsze odpowiadamy – do jakich celów ma być używana łódź. Są obszary gdzie SDS ma znaczną przewagę w osiągach ale są i takie gdzie ma ją Water Jet. Dla jednostek operujących głównie w przedziałach prędkości powyżej 30 […]
Dobór przekładni
Właściwy dobór przełożenia obrotów silnika jest kolejnym krytycznym elementem z punktu widzenie osiągów i efektywności napędu. Na przełożenie mają wpływ następujące elementy: obroty silnika (rpm) współczynnik mocy do masy w tonach (hp/t) prędkość wyprzedzenia pędnika (speed of advance) lub wskaźnik Froude (V/LWL0,5) Gdzie:V – prędkość w knLWL – długość linii wody (w stopach)P – całkowita moc […]